Разработана концепция робота для сборки космического телескопа
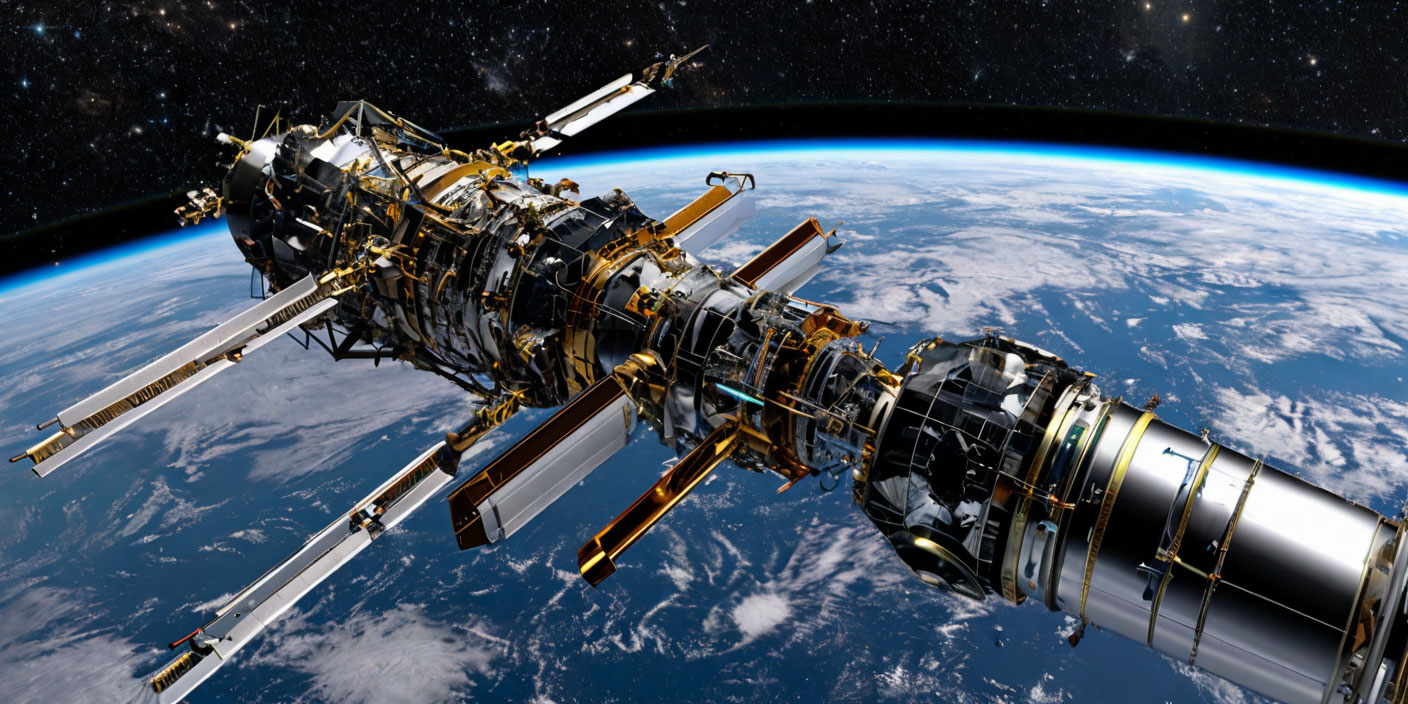
Специалисты Линкольнского центра автономных систем предложили концепцию робота для сборки гигантского космического телескопа на орбите.
Результаты исследования опубликованы в журнале Acta Astronautica. Робот, названный E-Walker, может работать на орбите и выполнять сложные манипуляции, постепенно собирая крупные космические конструкции.
Он оснащён семью степенями свободы. Концепция предполагает взаимодействие двух космических аппаратов: базового космического корабля (BSC) и космического корабля-хранилища (SSC).
BSC отправляет команды роботу и следит за его состоянием, а SSC вмещает зеркальные модули, которые E-Walker извлекает для сборки. Исследователи разработали концепцию телескопа с широкой апертурой (LAST), который собирается из модулей, известных как PMU (Primary Mirror Unit).
Зеркало состоит из 342 PMU, образующих сегменты, а каждый сегмент включает 19 блоков PMU. Это позволяет роботу строить большие зеркала с высокой точностью и эффективностью.
Команда рассмотрела 11 возможных сценариев работы (ConOps) для E-Walker, включая варианты с одним или несколькими роботами. Некоторые сценарии предполагают совместную работу двух роботов, что повышает безопасность и эффективность сборки.
В будущем роботы, такие как E-Walker, могут стать важными инструментами для создания сложных систем на орбите, способствуя развитию новых космических станций, телескопов и других объектов.